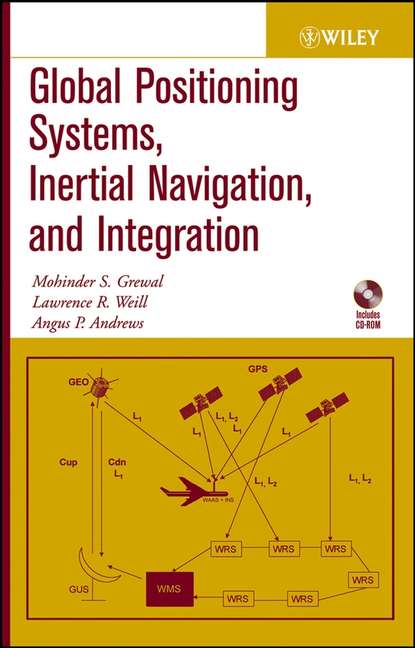
Книга "Глобальные системы позиционирования, инерциальная навигация и интеграция" является единственным всесторонним руководством по фильтрации Калмана и его применению к реальным проблемам GPS/INS. Авторы книги - признанные авторитеты в этой области, и они предоставляют инженерам, компьютерным ученым и другим читателям практические знания о теории и современных применениях глобальных систем позиционирования, инерциальных навигационных систем и фильтров Калмана. В книге акцент сделан на решении реальных проблем, с особым вниманием к эффективному использованию современных интеграционных методов для этих систем, особенно применению фильтра Калмана. Авторы исследуют различные тонкости, распространенные ошибки и врожденные ограничения теории в ее применении к реальным ситуациям, и предоставляют многочисленные примеры приложений и задачи на практику, включая GPS-помогаемую INS, моделирование гироскопов и акселерометров, а также WAAS и LAAS. Они также представляют множество оригинальных методов для проектирования и реализации, которые не встречаются в других профессиональных источниках, включая:
#научно-популярная литература